Media Summary: Major Research Project Part – II On Path Planning Path Optimization and Obstacle Avoidance Mobile robot with A* and Dynamic Window Approach in static environment Potential Field Method is used to simulate
Mobile Robot In Static Environment - Detailed Analysis & Overview
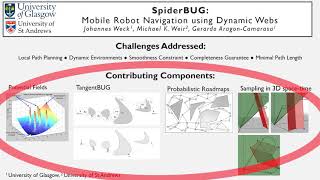
Major Research Project Part – II On Path Planning Path Optimization and Obstacle Avoidance Mobile robot with A* and Dynamic Window Approach in static environment Potential Field Method is used to simulate Video Author: Johannes Weck Video Submission for ICRA 2021. Abstract: The problem addressed in this paper is that of an ... This video only shows the mobility of a differential-steered two-wheeled Demonstrating the ability of a deep neural network controlled
In this tutorial, I'll guide you through setting up and simulating a By combining off-the-shelf sensors and sensor fusion techniques with a custom-built reinforcement learning AI algorithm, we are ... Localization and Mapping, odometry based localization, dead reckoning based localization, map based localization, Kalman filter ...