Media Summary: We propose a novel shared control strategy for mobile robots in a human- Rover autonomous navigation with obstacle avoidance Dynamic Obstacle Avoidance for CDPRs with Mobile Bases via Sim-to-Real Reinforcement Learning
Dynamic Static Obstacle Avoidance Amr Autonomous Navigation - Detailed Analysis & Overview
We propose a novel shared control strategy for mobile robots in a human- Rover autonomous navigation with obstacle avoidance Dynamic Obstacle Avoidance for CDPRs with Mobile Bases via Sim-to-Real Reinforcement Learning using SLAM and adaptive monte carlo localization , the Creativity is intelligence having fun .. Lab is always fun playing with technology, team having fun while testing Video shows our open-source autonomy stack deployed on the Unitree G1 humanoid robot for
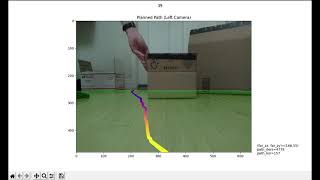
Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning