Media Summary: Yevgen Chebotar, Ankur Handa, Viktor Makoviychuk, Miles Macklin, Jan Issac, Nathan Ratliff, Dieter Fox We consider the problem ... Supplementary video for the ICRA 2018 paper: " Best Cognitive Robotics Paper Award Finalist. Website: Abstract: Policies trained in ...
Closing The Sim To Real Loop Adapting Simulation Randomization With Real World Experience - Detailed Analysis & Overview
Yevgen Chebotar, Ankur Handa, Viktor Makoviychuk, Miles Macklin, Jan Issac, Nathan Ratliff, Dieter Fox We consider the problem ... Supplementary video for the ICRA 2018 paper: " Best Cognitive Robotics Paper Award Finalist. Website: Abstract: Policies trained in ... Arxiv link: Author: Allen Z. Ren, Hongkai Dai, Benjamin Burchfiel, Anirudha Majumdar Under ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod T.8 Authors: Peng, Xue Bin; Andrychowicz, Marcin; Zaremba, ... A candidacy exam by David Watkins-Valls Abstract
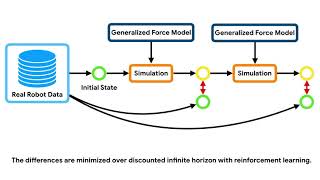
Published at CoRL 2017 Title: Transferring End-to-End Visuomotor Control from Abstract: Reinforcement learning provides robots with an autonomous learning framework where a skill can be learned by ... Course Instructor: Pieter Abbeel Guest Lecturer: Josh Tobin Course Website: ... This is one of the experiment environments from our article " Modelling Generalized Forces with Reinforcement Learning for Sim-to-Real Transfer