Media Summary: This video presentation is prepared in context of ECE504 AUTONOMOUS Subject: Mechanical Engineering and Science Course: 3rd International Workshop on “Computer Information Technologies in Industry 4.0”
Bug Algorithms Mobile Robotics - Detailed Analysis & Overview
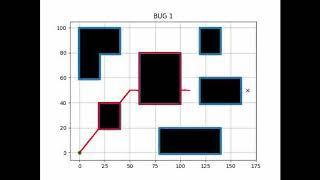
This video presentation is prepared in context of ECE504 AUTONOMOUS Subject: Mechanical Engineering and Science Course: 3rd International Workshop on “Computer Information Technologies in Industry 4.0” Lecture 1.2. Wherein we introduce and explore the operation of the Citation: Yufka, A., and Parlaktuna, O., "Performance Comparison of the In this video, the 9th of the series Exploring ROS with a 2 Wheeled










![[ROS Projects] - Bug 0 Foil vs. Bug 1 - Exploring ROS With a 2 wheeled Robot - Part 9](https://i.ytimg.com/vi/C1mzAGNZ0K4/mqdefault.jpg)
